3D Reconstruction and skeleton-based motion tracking
In this page, you can find the supplementary material for the paper entitled “An integrated platform for live 3D human reconstruction and motion capturing”, IEEE Trans. on Circuits and Systems for Video Technology (TCSVT), 2016.

The supplementary PDF document, including extended experimental results, can be downloaded from here. The dataset used in the experiments, along with the necessary code and documents, can be found here. Necessary material for the external calibration of multiple Kinects can be found at the bottom of this page.
3D reconstruction
Below, you can find supplementary videos on 3D reconstruction. Reconstruction results were obtained using capturing setups with multiple Kinects2, in small-area and medium-area spatial configurations. Small-area configuration: Four sensors are placed on a circle of radius approximately 2.5m, with an individual performing athletic movements at the center of the captured space. Medium-area configuration: Professional athletes are captured, performing “skills” of traditional Gaelic and Basque sports. The capturing setup consists of four sensors, placed on a circle of radius close to 4m. The athletes perform fast sport “skills”, within a large area, sometimes at the distance limits of Kinect2.
Video 1:
[embed]http://vcl.iti.gr/datasets/video/MultiKinect2Reconstruction.mp4[/embed]
Video 2:
[embed]http://vcl.iti.gr/datasets/video/MultiKinect2Reconstruction-Basque.mp4[/embed]
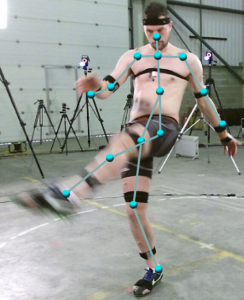
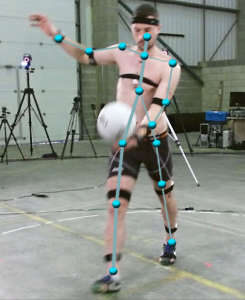
Skeleton-based motion tracking
Our motion capturing system is evaluated using the medium-area configuration, with professional athketes performing “skills” of traditional Gaelic and Basque sports. The dataset apart from multiple Kinect2 data, includes Vicon marker-based ground-truth. The captured motions are challenging, fast, with severe self-occlusions and simultaneous movements of several body parts. Below, you can find a supplementary video on skeleton-based motion tracking.
Video 3:
Video 4:
Video 5:
Video 6:
Video 7:
Video 8:
Video 9:
Multiple Kinects external calibration
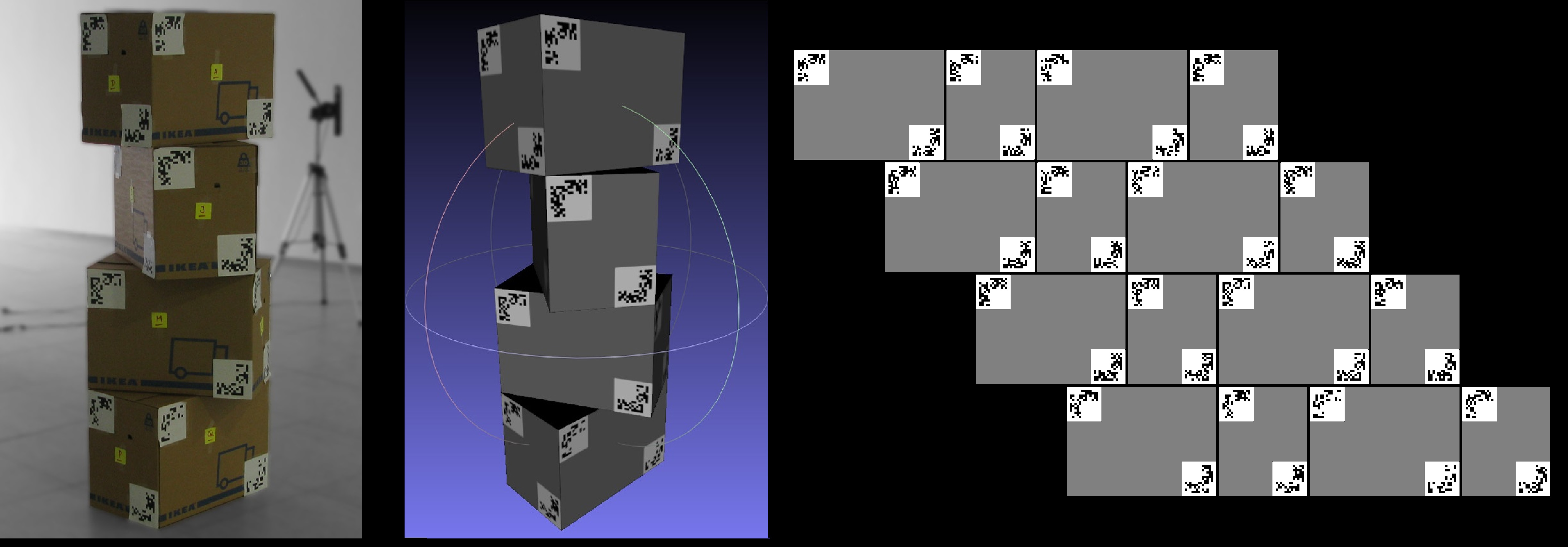
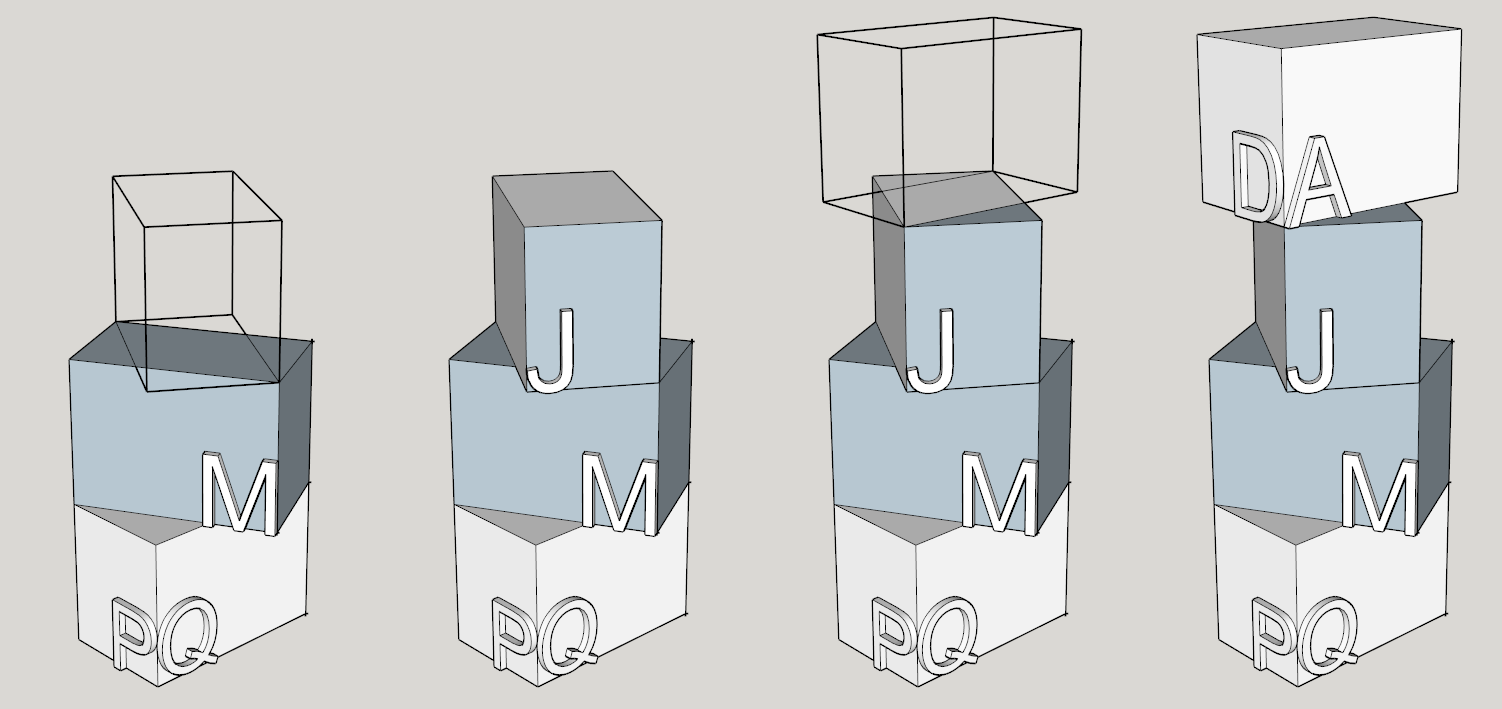
Spatial (external) calibration of the sensors is achieved through a novel registration method, utilizing an easy-to-build calibration structure that serves as a registration anchor.The calibration structure is realized with 4 standardized IKEA package boxes (JATTENE, 600.471.51), of size 56x33x41 cm^3, as well as 32 unique Quick Response (QR) markers [ISO/IEC 18004:2006], placed at the corners of the boxes’ side faces.
The set of QR markers can be found here. A CAD 3D model, the exact 3D virtual counterpart was also designed. The CAD model and sample code can be downloaded from here.
A complete manual with instructions on how to build the calibration structure can be downloaded from here.